SAM
Im Rahmen des Projektes SAM (Smart AUV-based Magnetics) entwickeln wir smarte und tatsächlich autonome Systeme zur AUV(Autonomous Underwater Vehicle)-gestützten Detektion ferromagnetischer Objekte wie z.B. Munitionsaltlasten / UXO (UneXploded Ordnance). Basierend auf magnetischen in-situ Messungen kontrollieren und berechnen die SAM-Routinen eigenständig die nächsten Navigationswegpunkte bzw. komplette Suchmuster des Unterwasserroboters.
Ziel von SAM ist die vollständig automatisierte Detektion, Lokalisierung und Bewertung magnetischer Anomalien im Offshorebereich inkl. der Erstellung eines ausführlichen Berichtes über jedes untersuchte Objekt.
Primäre Einsatzbereiche von SAM sind die automatisierte Offshore-Kampfmitteldetektion sowie die Überwachung von Pipelines, Kabeltrassen, Häfen und Seestraßen durch robotische Systeme.
a)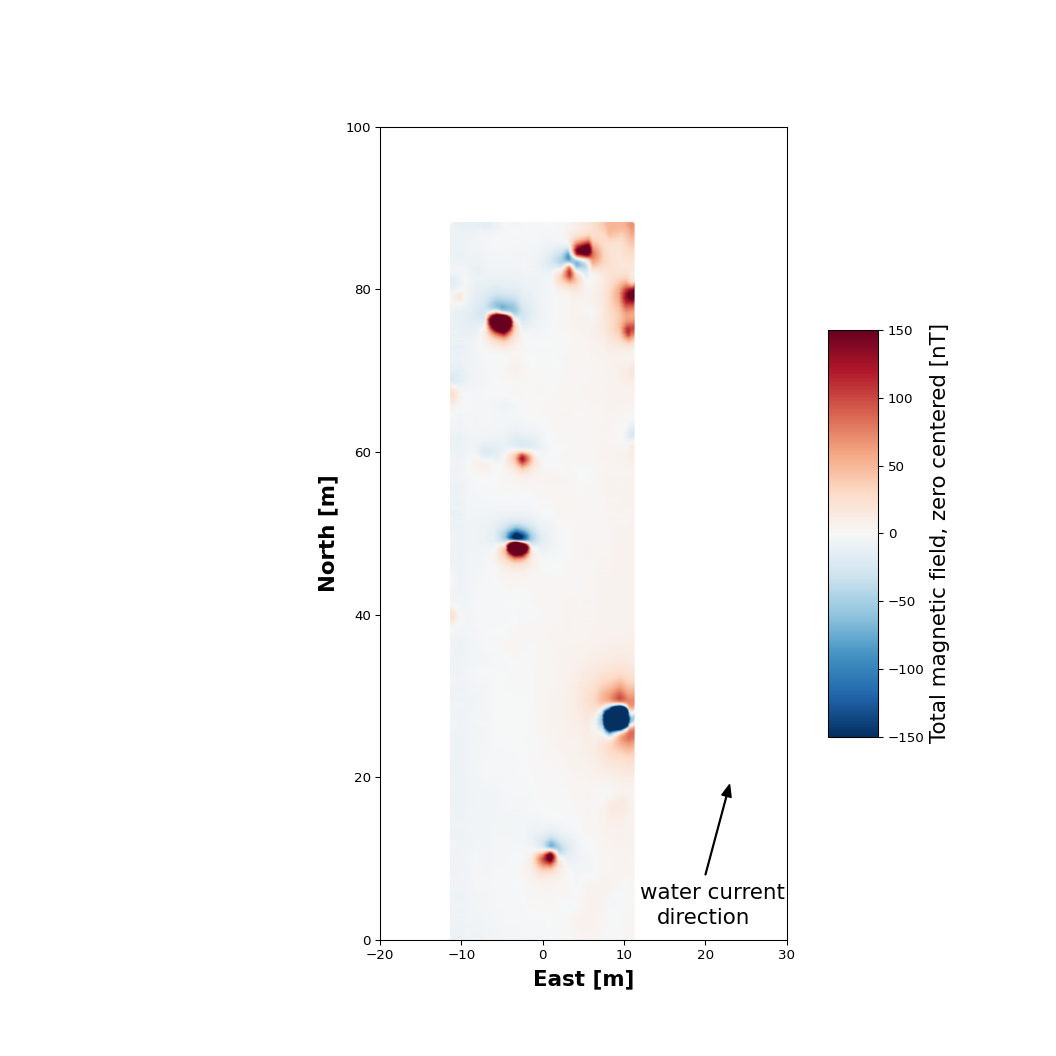 |
b)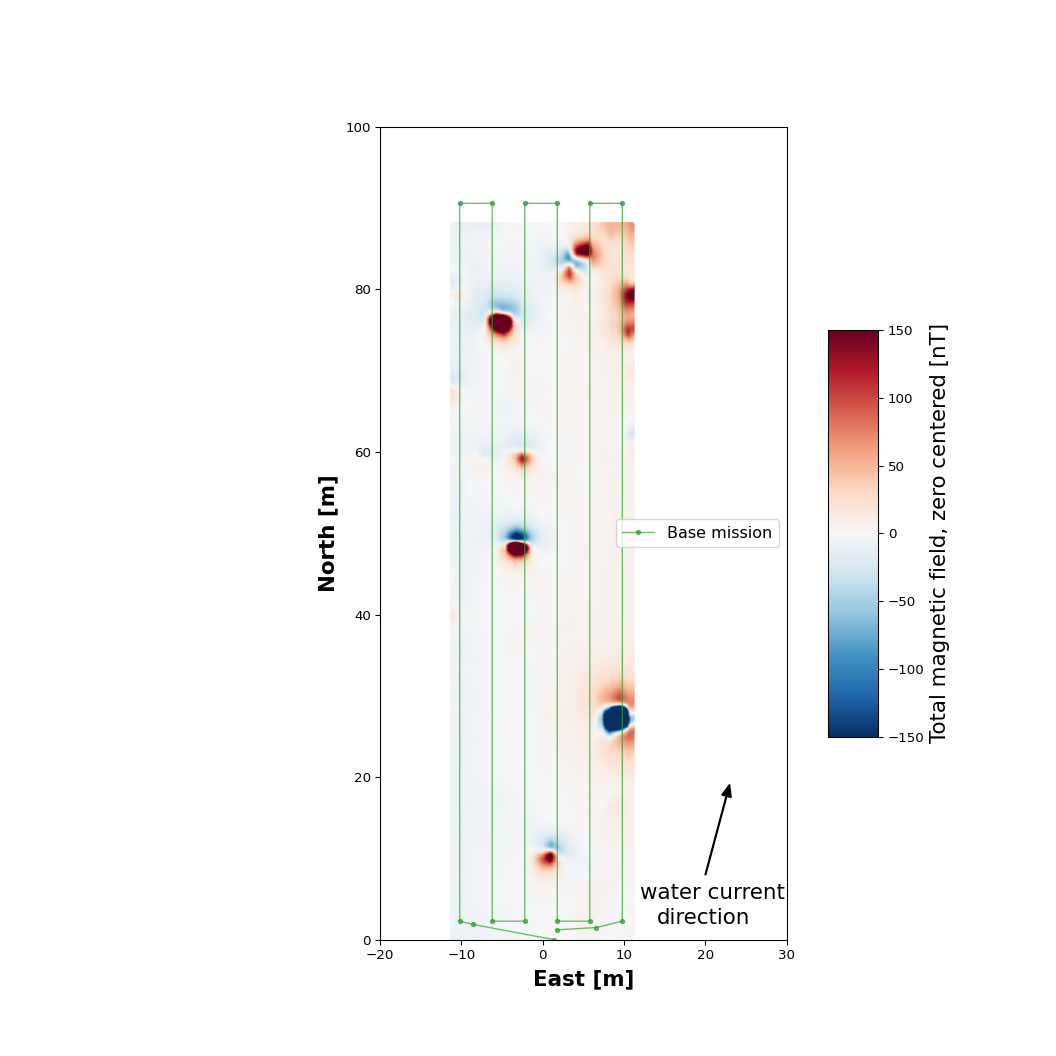 |
| Magnetic background / Ground truth (unknown prior to AUV mission). |
AUV base mission covering the entire area using a coarse linespacing. |
c)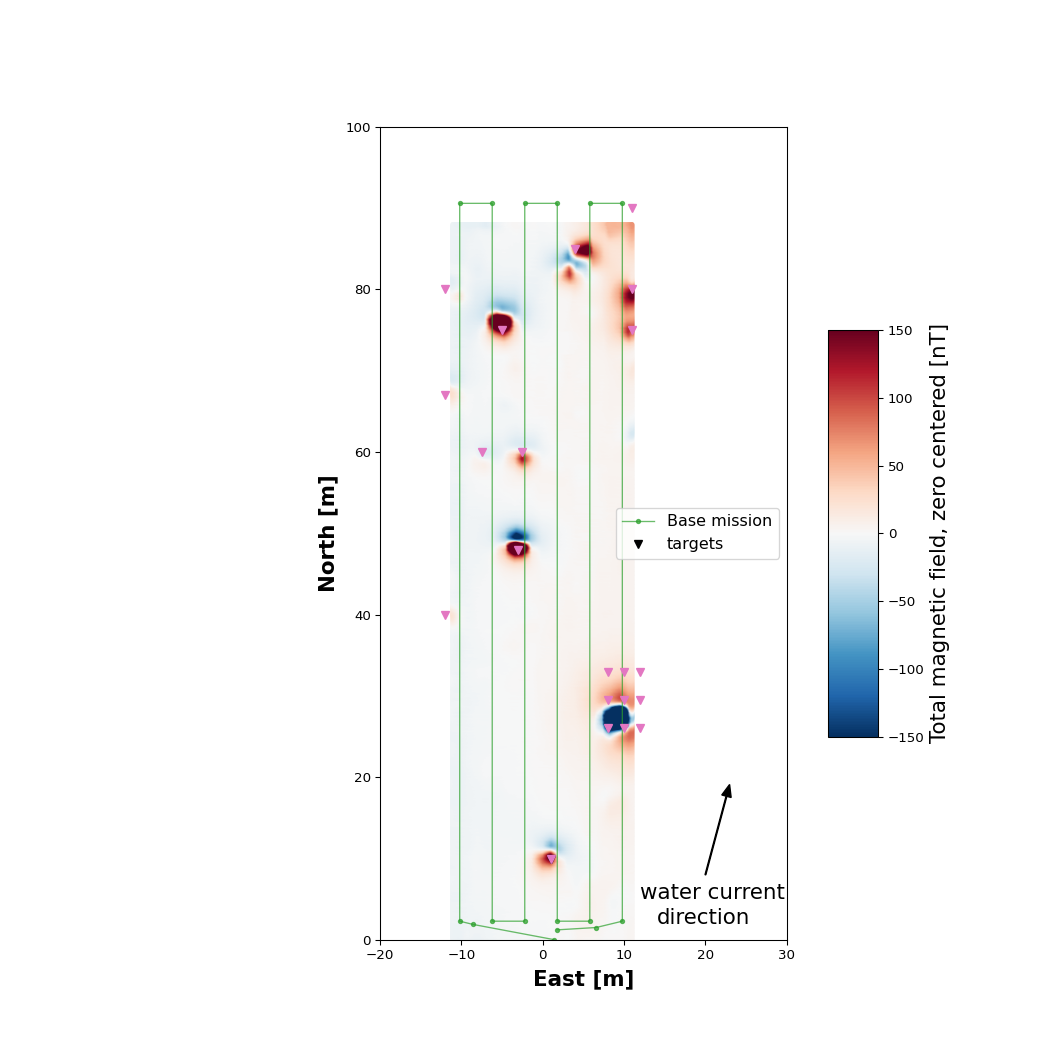 |
d)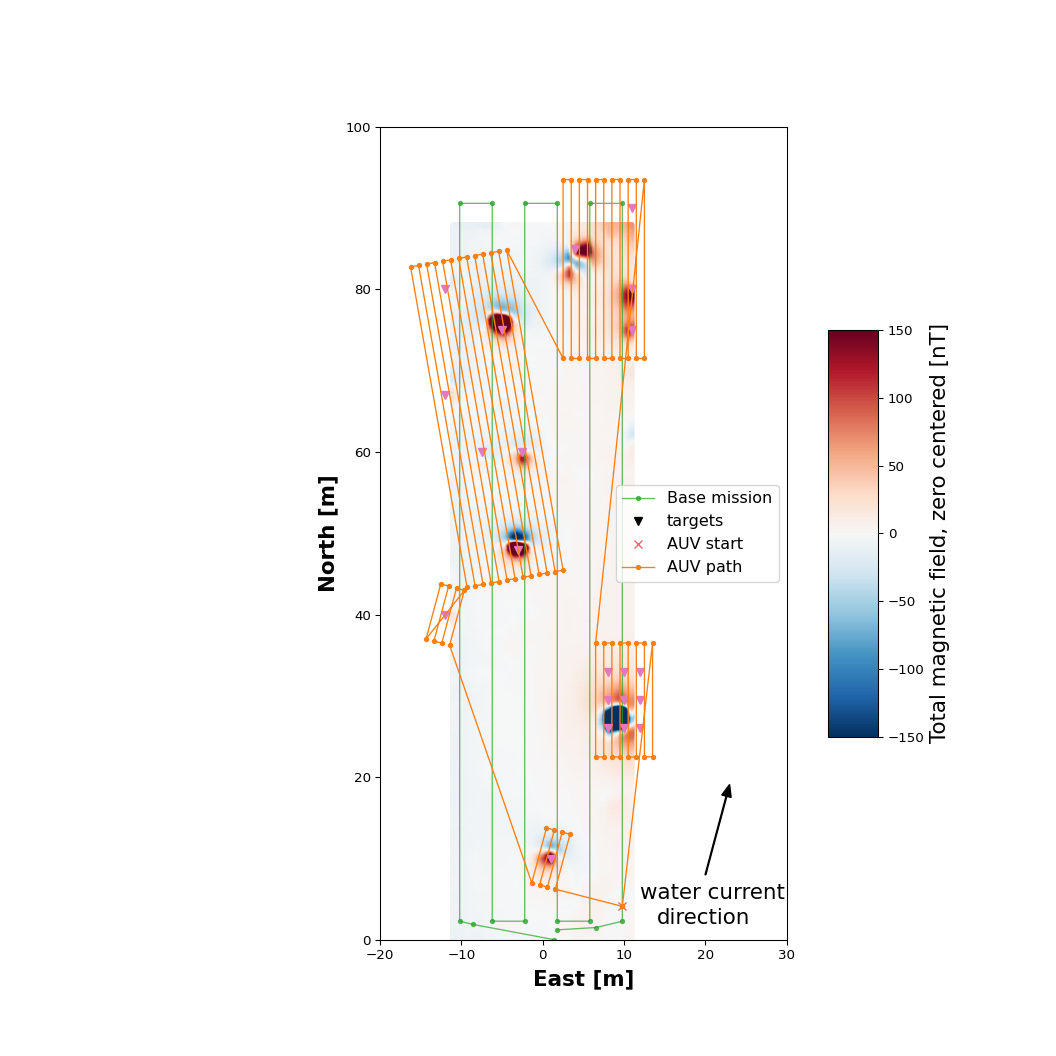 |
| If the algorithms find magnetic anomalies, target locations are estimated. |
Nearby target locations are clustered and investigated in more detail. |